

Safe and efficient maneuvering
The collaborative MIR500 safely maneuvers around people and physical obstacles. With its advanced technology and sophisticated software, the robot autonomously navigates to find the most efficient path to its destination. When it meets obstacles, it will automatically re-route to avoid costly lags in logistics processes.
MiR500 is equipped with the latest laser-scanning technology that delivers a 360-degree visual for optimal safety. 3D cameras have a range of 30-2,000 mm above floor level to detect pallets.
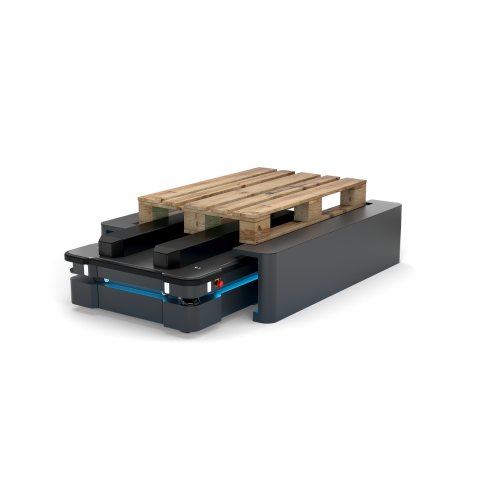
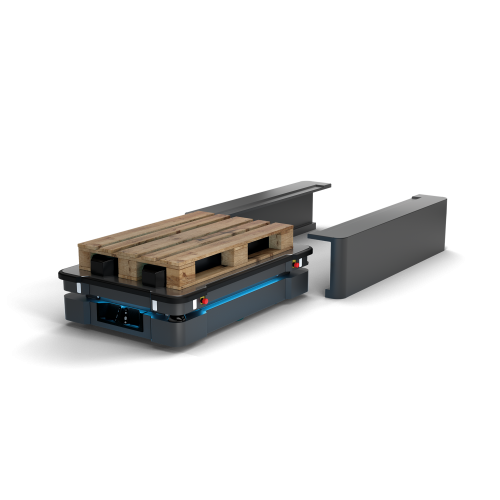
Optimize pallet transportation without changing facility layout
With the MiR500 Pallet Lift, the MiR500 picks up, transports and unloads pallets autonomously, freeing up employees for more valuable tasks. There is no need to change the facility layout when operating the MiR500 as the function of wires, magnets or QR codes is replaced by sophisticated navigation software. Simply download CAD files of the facility to the robot or use its laser scanners to create a map – that’s all it takes to ensure a fast and cost-efficient implementation.
A robust robot for the industry
MiR500 is compliant with ISO/EN 13849 and fulfills the EMC requirement for industrial and light industrial use. The rugged MiR500 is designed for industry use with robust exterior that can withstand dropped cargo and can easily navigate up and down ramps and even through shallow water puddles.
Highly user friendly and flexible
The user-friendly MiR500 gives you full control of the robot from the very start. MiR500 is controlled with the intuitive MiR Robot Interface via smartphone, tablet or PC, and can be programmed without any prior experience. The robot can also be integrated into your ERP system for a fully automated solution.
With the ability to quickly and easily integrate different top modules, the MiR500 can be equipped with pallet forks, conveyors, a robot arm or other options to support a wide range of applications.
ADVANTAGES
✓ Efficient transportation of payloads up to 500 kg with high speed
✓ Optimizes your internal transportation of heavy loads and pallets and allows employees to focus on higher value activities
✓ Eliminates material flow bottlenecks to increase productivity
✓ Maneuvers safely and efficiently around people and obstacles in even highly dynamic environments
✓ Requires no changes to existing facility
✓ Extremely flexible and can be redeployed for different tasks with customized top modules
✓ User-friendly interface that can be programmed without prior experience
General information
| Type | Collaborative mobile robot. |
| Designated use | Internal transportation of loads, automation of internal logistics. |
| Color | RAL7011 |
Dimensions
| Length | 1350 mm |
| Width | 920 mm |
| Height | 320 mm |
| Height with MiR500 EU Pallet Lift | 410 mm |
| Height with MiR500 Lift | 410 mm |
| Weight (without load) | 230 kg |
| Weight with MiR500 EU Pallet Lift | 290 kg |
| Weight with MiR500 Lift | 325 kg |
| Clearance from ground | 30 mm |
| Wheel diameter | Drive wheel: 200 mm. Caster wheel: 100 mm. |
| Load surface | 1300 mm x 900 mm |
Payload
| Payload | 500 kg |
| Dimensions for mounting top applications | Robot footprint. Contact MIR If a bigger top application is required. |
Driving and navigation
| Maximum speed (full payload, flat surface) | 1.2 – 2.0 m/s (2.0 speed upgrade kit available from 01.01.2019) |
| Acceleration (full payload, flat surface) | 1.0 m/s^2 |
| Maximum incline | 1%, at 0.5 m/s |
| Turning diameter | 2000 mm |
| Minimum width, door | Normal operation: 1500 mm. Muted personnel detection means: 1000 mm. |
| Minimum width, passage (0.5 m or longer) | 1600 mm |
| Minimum width, two robots passing | 2800 mm |
| Precision, docking to VL marker | Position (center of robot): +/- 5 mm. Angle: +/- 1°. |
| Occupied pallet rack detection | Yes |
| Docking types | Forward docking, reverse docking (not available with a pallet rack) |
Battery, charging
| Charging options | MiRCharge 500, cable charger |
| MiRCharge 500 | The robot communicates with MiRCharge 500 through CAN interface. Charging starts only when the robot connection is present. |
| Cable charger | When charging with the cable charger, the robot goes into emergency stop. |
| Charging current, MiRCharge 500 | 35 A |
| Charging time, MiRCharge 500, 10% to 90% | 1 hour |
| Charging current, cable charger | 20 A |
| Charging time, cable charger, 10% to 90% | 2 hours |
| Active operation time between charging (approximate) | 8 hours |
| Standby time | 10 hours |
| Full charging cycles, minimum | 1000 |
| Battery voltage | 48 V |
| Battery capacity | 2 kWh (40 Ah at 48 V) |
Environment
| Ambient temperature, operation | +5°C to 40°C |
| Ambient temperature, storage | -10°C to 60°C |
| Humidity | 10-95% non-condensing |
| Environment | For indoor use only |
| IP Class | IP21 |
| Water on floor | Can survive driving through small puddles of water on floor |
Safety
| Safety functions | 5 safety functions according to ISO 13849-1. MiR500 stops if a safety function is triggered. |
| Emergency stop | Triggered by pressing the E-stop button. |
| Collision avoidance | Triggered by a human or other obstacle in the path of travel. |
| Overspeed avoidance | Triggered if the speed exceeds 1.35 m/s. |
| Safe load position | Triggered if the speed exceeds 0.3 m/s while the pallet lift is not in the low position. |
| Stability | Triggered if the speed difference of the two motors exceeds the predefined limits. |
| Manual control in robot interface | Token-based system for accessing the manual control. The robot issues only one token at a time. |
Compliance and approvals
| Safety standards for industrial vehicles | ISO/CD 3691-4, EN1525, ANSI B56.5 |
| EMC | EN61000-6-2, EN61000-6-3 |
Connectivity, I/O
| I/O connections | 4 digital inputs, 4 digital outputs, 1 Ethernet port with Modbus protocol. |
| Safety I/O connections | 8 digital inputs, 5 digital outputs. |
| WiFi connection | Router: 2.4 GHz and 5 GHz. Internal computer: WiFi adapter: 2.4 GHz and 5 GHz, 2 internal antennas. |
| Power for top modules | 48 V / 20 A, 48 V SafePWR / 20 A shared, 24 V / 2A. |
Sensors and cameras
| Laser scanners | 2 psc.: SICK microScan 3. FoV: 360° up to 30 m in a plane at 200 mm height. |
| 3D camera |